![]()
MR2 project has finished as a big disappointment and a fail. I was expecting that the servos used will run much faster when powering them from 12V. The robot is moving too slow, even slower than MR1. Also, I decided to quit having 4 wheels because I could not manage co-planarity problem (1 or 2 wheels were not touching the floor). I will try again the 4 wheels design on a future robot.
At a certain point I thought to quit finalizing this robot but I decided to go until the end, even if I was foreseeing the failure.
Nevertheless, there are still a few good points with this project: I played with Sharp sensors, with servo (finally I removed the electronics, but in the beginning I used them as servos) and I managed to build the chassis frame a little bit better than on MR1.
|
Specifications |
|
| Name | MR2 |
| Size | 98mm x 98mm x 55mm (length x width x height) |
| Weight | ~280g |
| Power supply | 3S1 LiPo battery |
| Microcontroller | PIC18F26K22 - I/SP @ 32MHz, 5V |
| Motors | 2 x SG5010 BB Standard Servo hacked for continuous rotation + electronics removed |
| Motor driver | SN754410NE 2 pieces in parallel |
| Wheels | custom wheels 43mm diameter |
| Tires | custom tires |
| Opponent detection sensors |
2 x Sharp GP2D12 2 x SHARP GP2y0d340 |
| Margin detection sensors | 2 x RPR-220 ROHM |
| Pushing strength | tested on a 1500g water bottle |
| Communication with PC | UART serial communication @9600baud |
| Operating modes |
remote controlled mode sumo mode |
| Microcontroller software | The software is written in C
language for Hi-Tech PICC compiler You can download it from here. |
| Electronics | Download it here. |
Pitcures and videos:
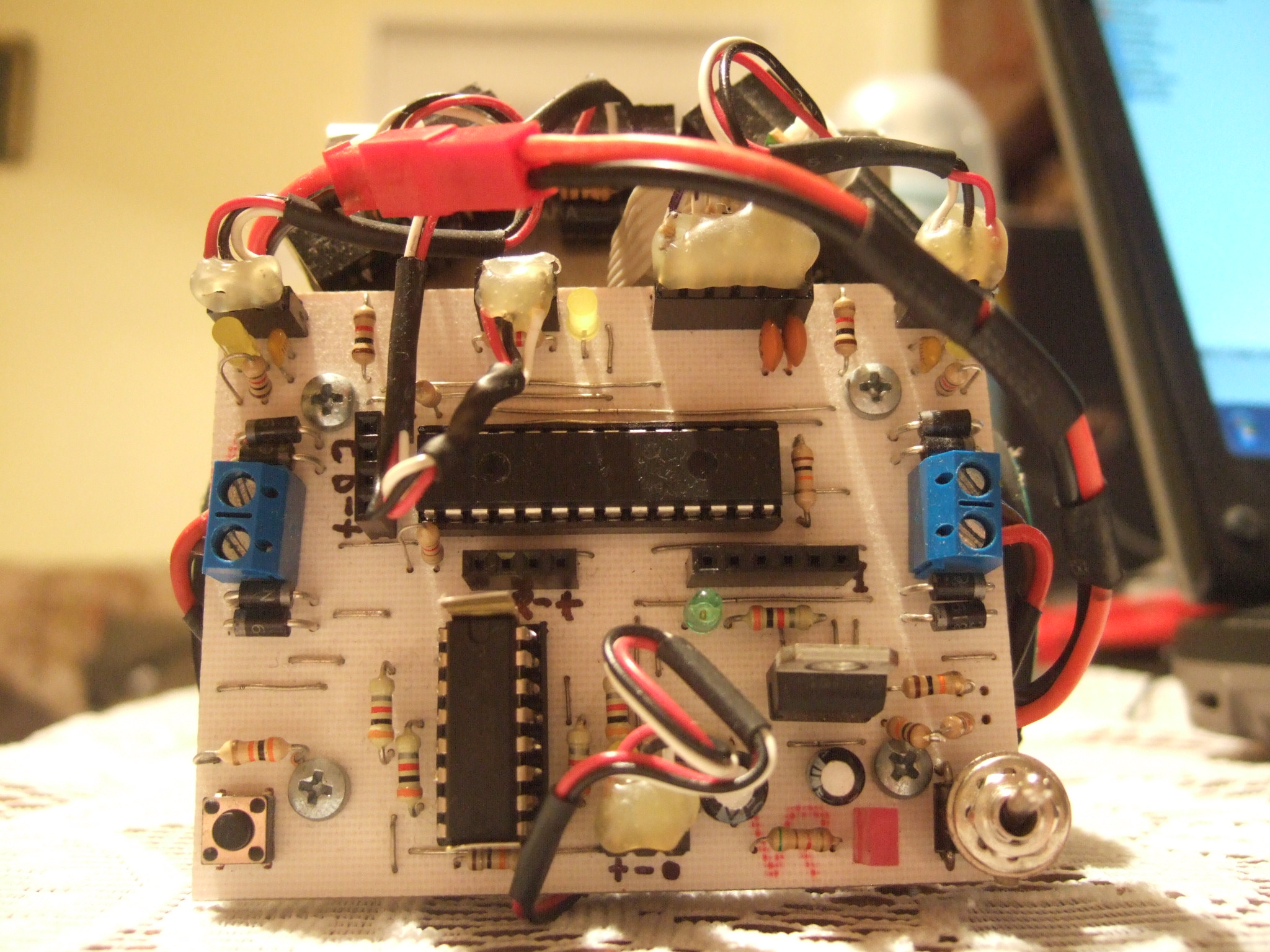 |
Upside view |
 |
Downside view |
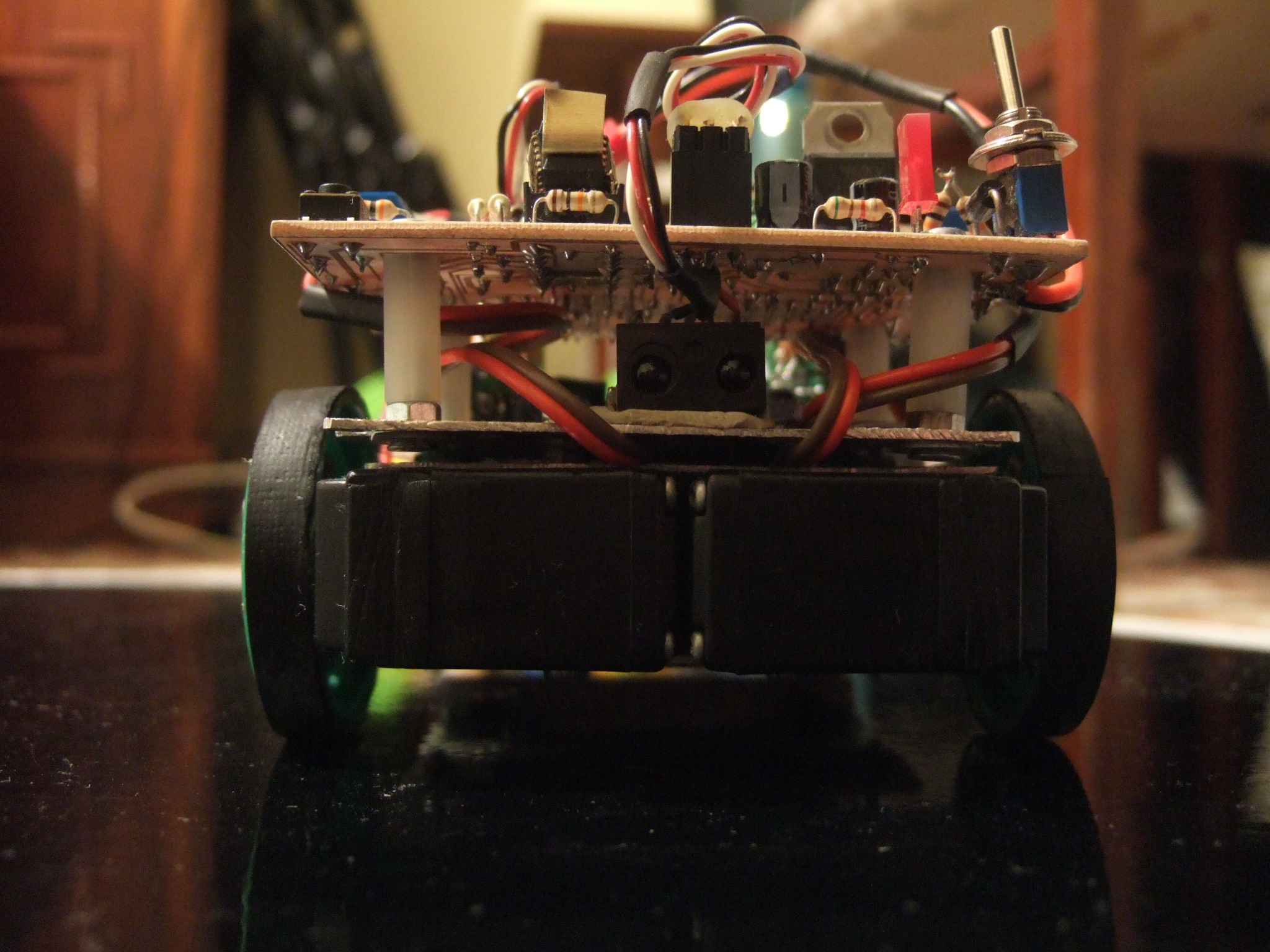 |
Rear side view |
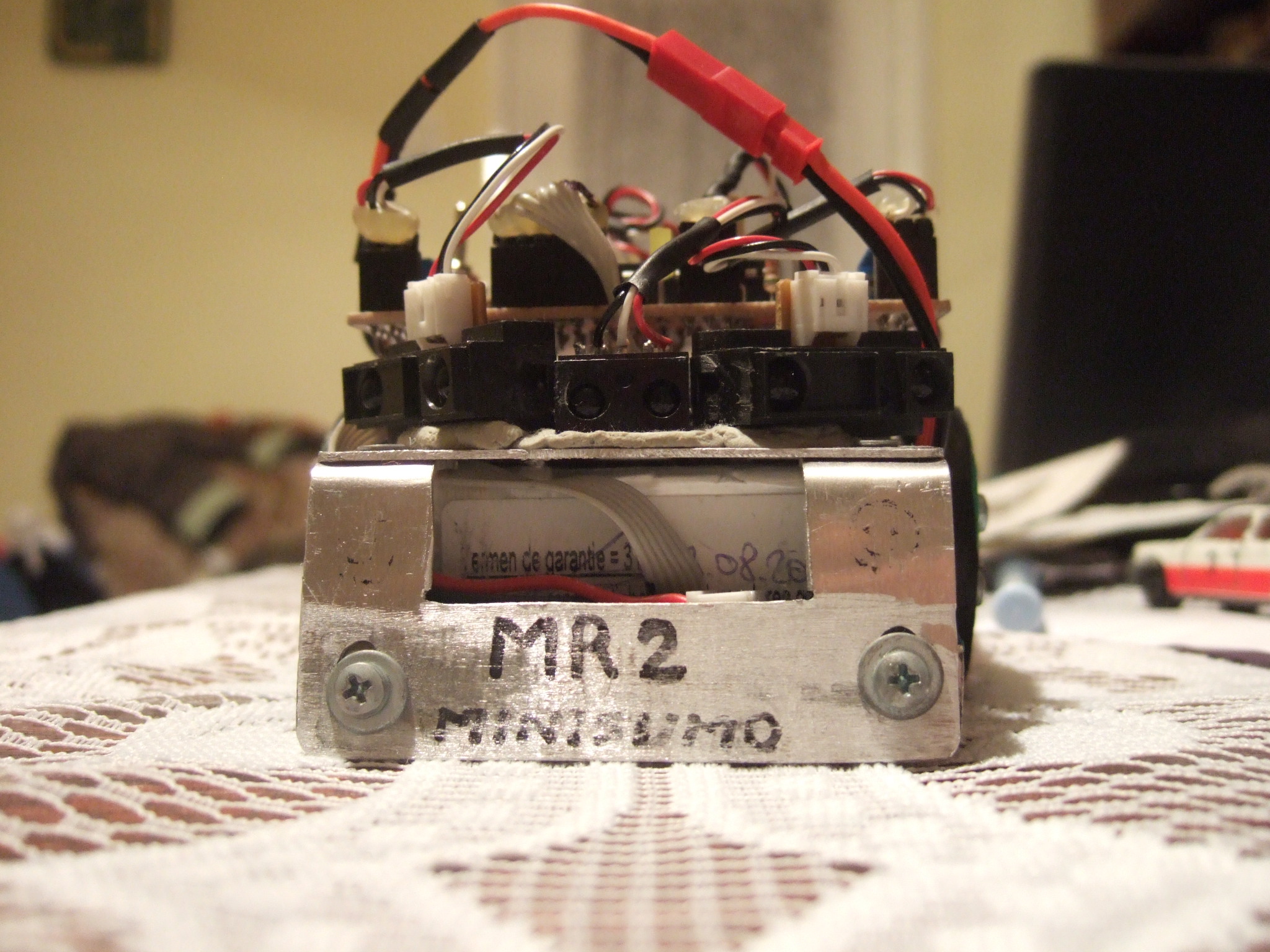 |
Front side view |
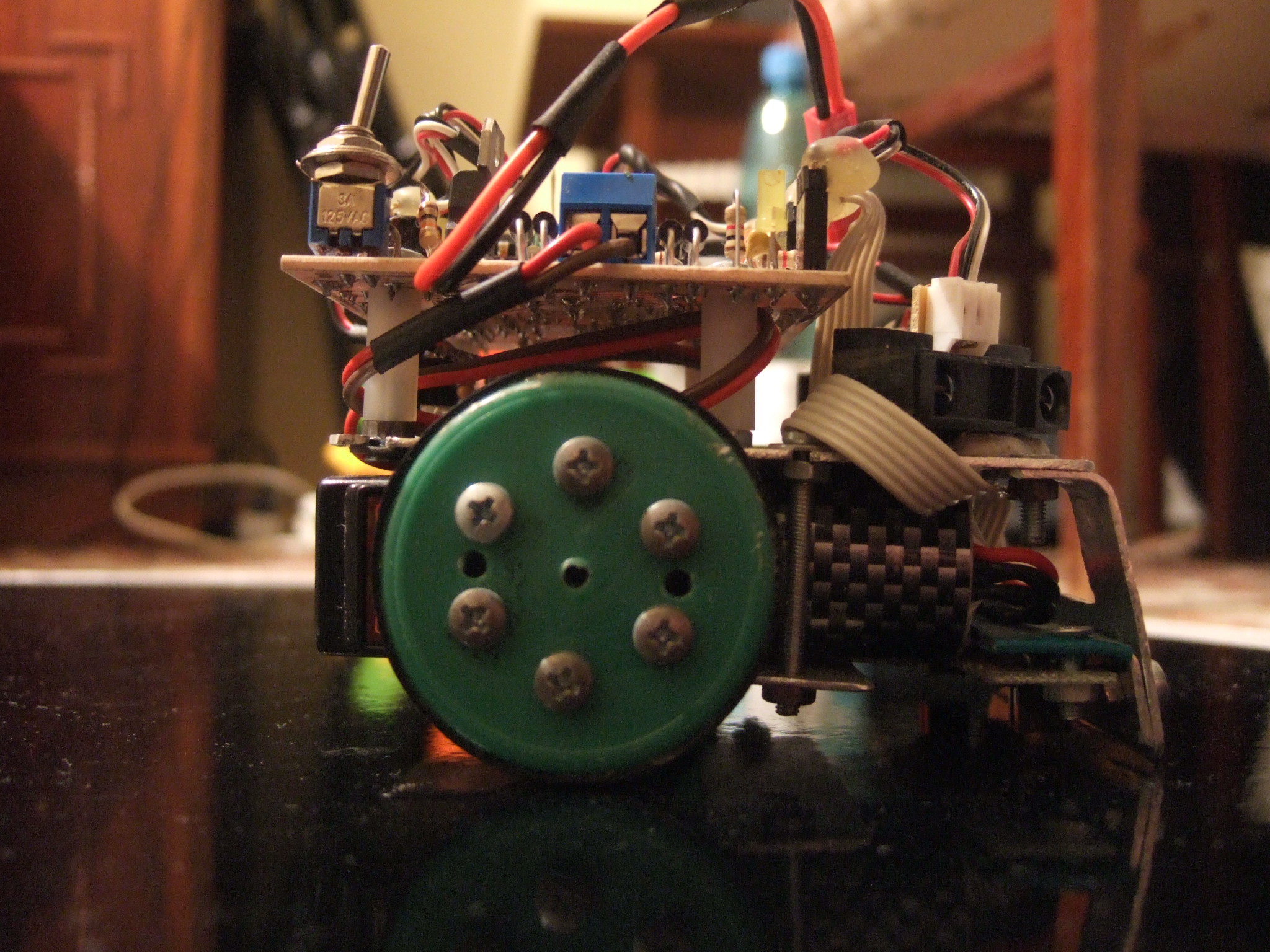 |
Right side view |
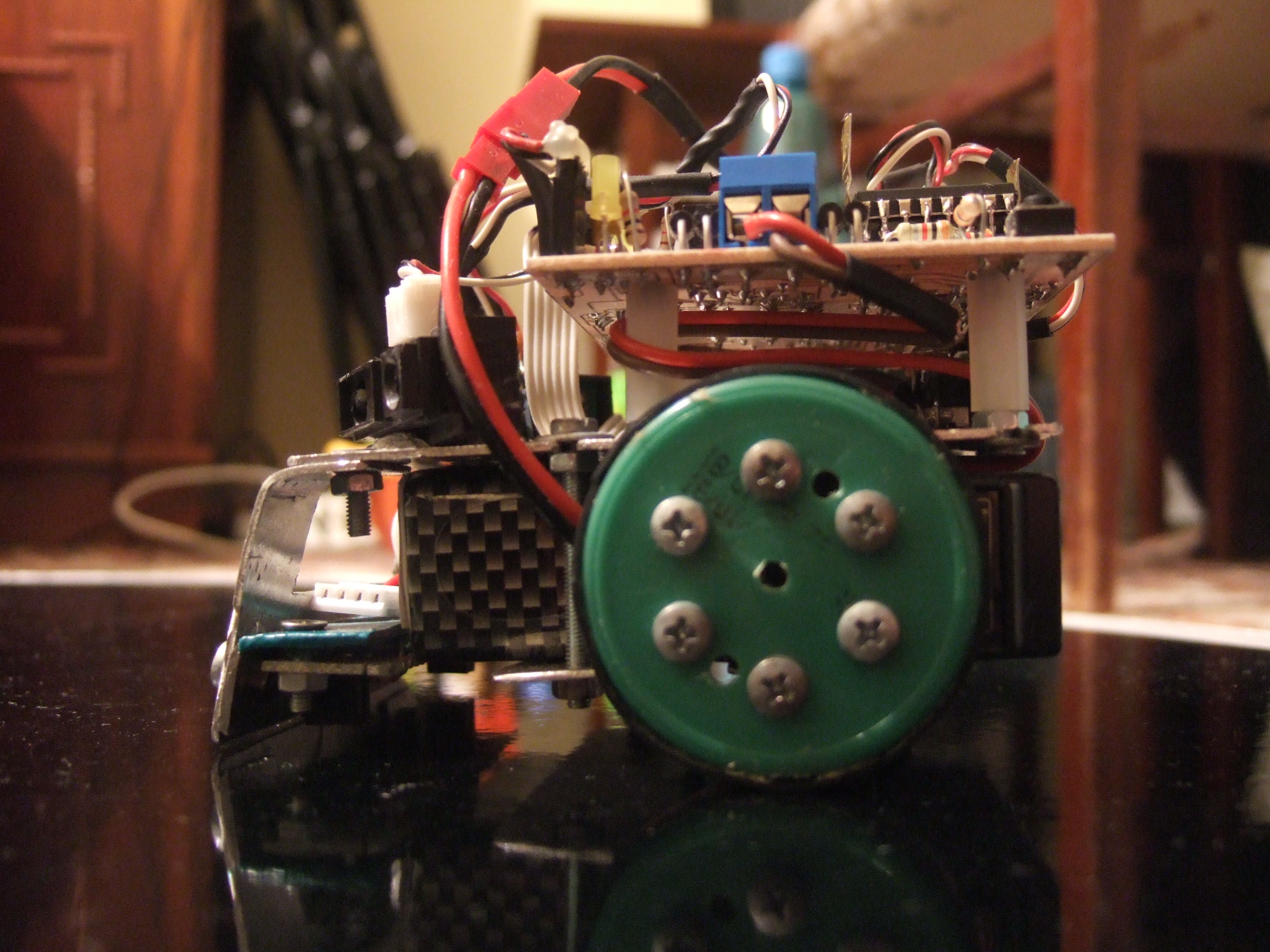 |
Left side view |
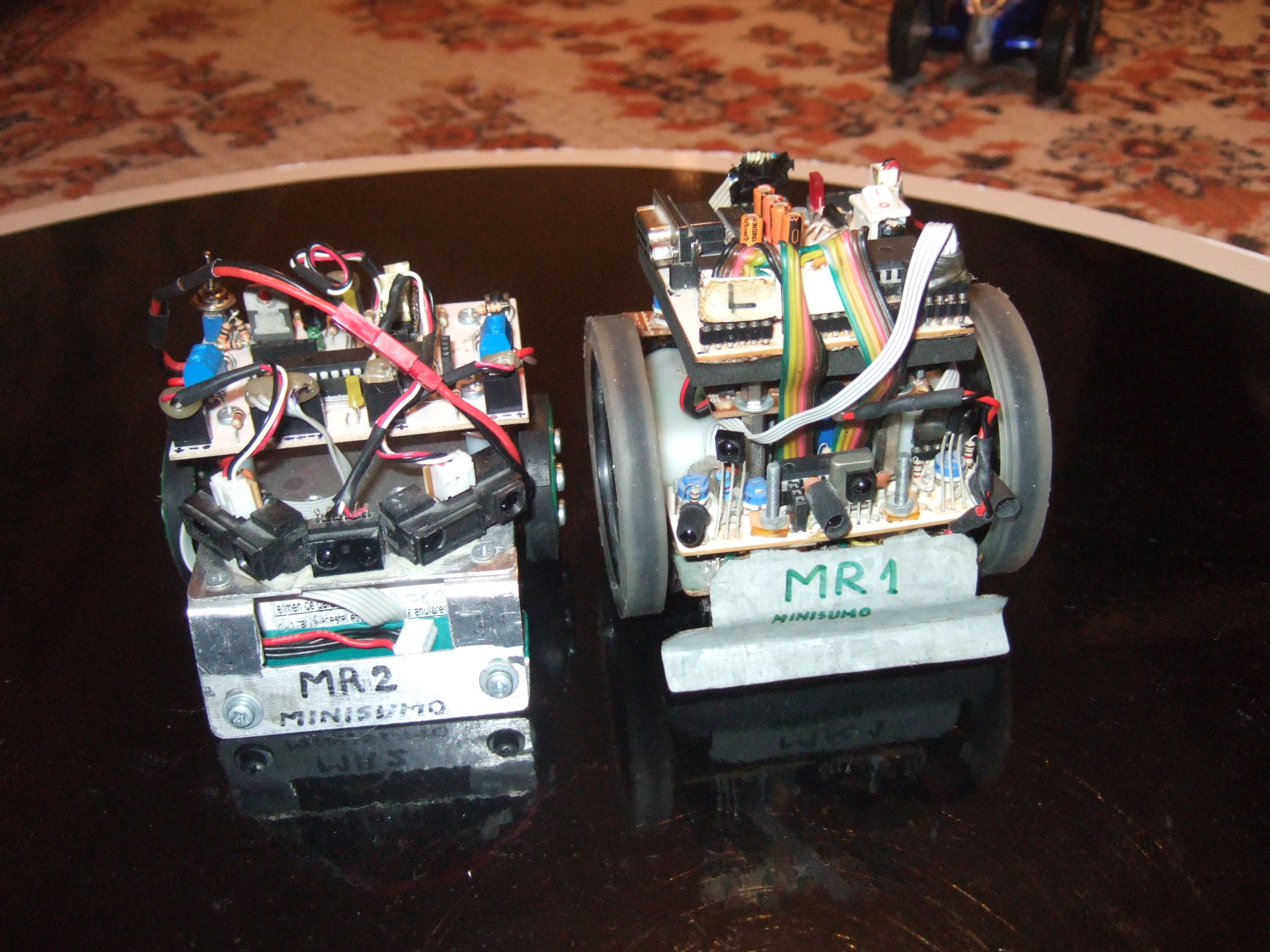 |
Together with MR1 |
 |
MR2 versus toys |
 |
MR2 versus water bottle |