![]()
Proiectul MR2 s-a terminat cu o mare dezamagire si cu un esec. Ma asteptam ca servo-urile folosite sa mearga mult mai rapid cand sunt alimentate la 12V. Robotul se misca prea incet, chiar mai incet decat MR1. De asemenea, am renuntat la a avea 4 roti fiindca nu am reusit sa rezolv problema co-planaritatii (1 sau 2 roti nu atingeau pamantul). Voi incerca designul cu 4 roti la un viitor robot.
La un moment am vrut sa renunt la a-l mai finaliza, dar am decis sa merg pana la capat chiar daca am prevazut esecul.
Una peste alta, sunt si puncte bune la proiectul asta: m-am jucat cu senzorii Sharp, cu servo-uri (in final am eliminat electronica, dar la inceput le-am folosit ca servo-uri) si am reusit sa construiesc un sasiu ceva mai bun decat la MR1.
|
Specificatii |
|
| Nume | MR2 |
| Dimensiuni | 98mm x 98mm x 55mm (lungime x latime x inaltime) |
| Masa | ~280g |
| Alimentare | acumulator LiPo 3S1 |
| Microcontroler | PIC18F26K22 - I/SP @ 32MHz, 5V |
| Motoare | 2 x SG5010 BB Standard Servo transformat pentru rotatie continua + electronica eliminata |
| Controler de motoare | SN754410NE 2 bucati in paralel |
| Roti | roti customizate 43mm diametru |
| Cauciucuri | cauciucuri customizate |
| Senzori pentru detectia adversarului |
2 x Sharp GP2D12 2 x SHARP GP2y0d340 |
| Senzori pentru detectia marginii | 2 x RPR-220 ROHM |
| Puterea de impingere | testat pe o sticla cu apa de 1.5kg |
| Comunicatie cu PC-ul | comunicatie seriala UART @9600baud |
| Moduri de operare |
controlat de la distanta mod sumo |
| Softul pentru microcontroler | Software-ul e scris in limbajul
C (Hi-Tech PICC de la Microchip) Il puteti descarca de aici. |
| Electronica | Descarcati de aici. |
Poze si filme:
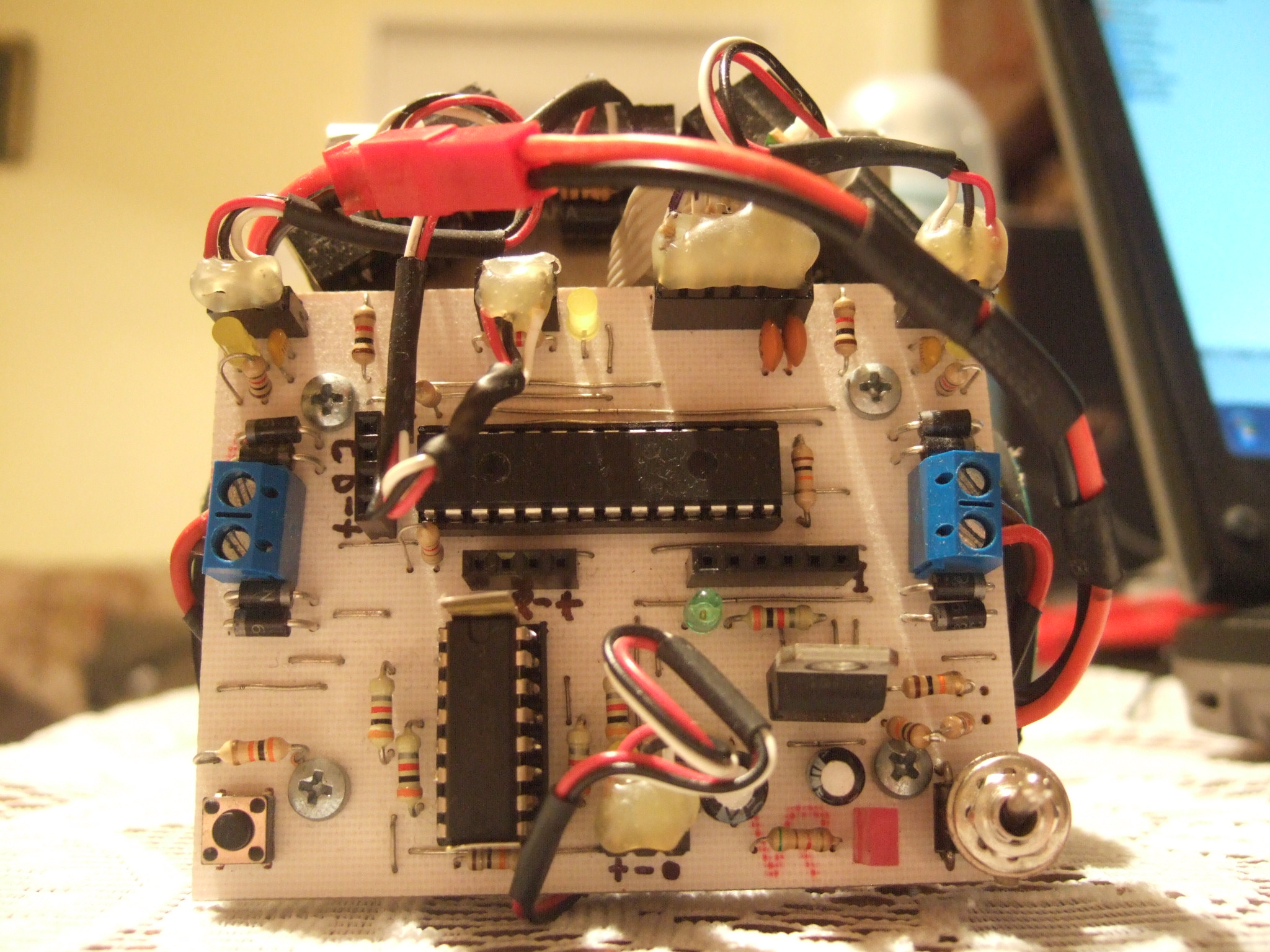 |
Vedere de deasupra |
 |
Vedere din jos |
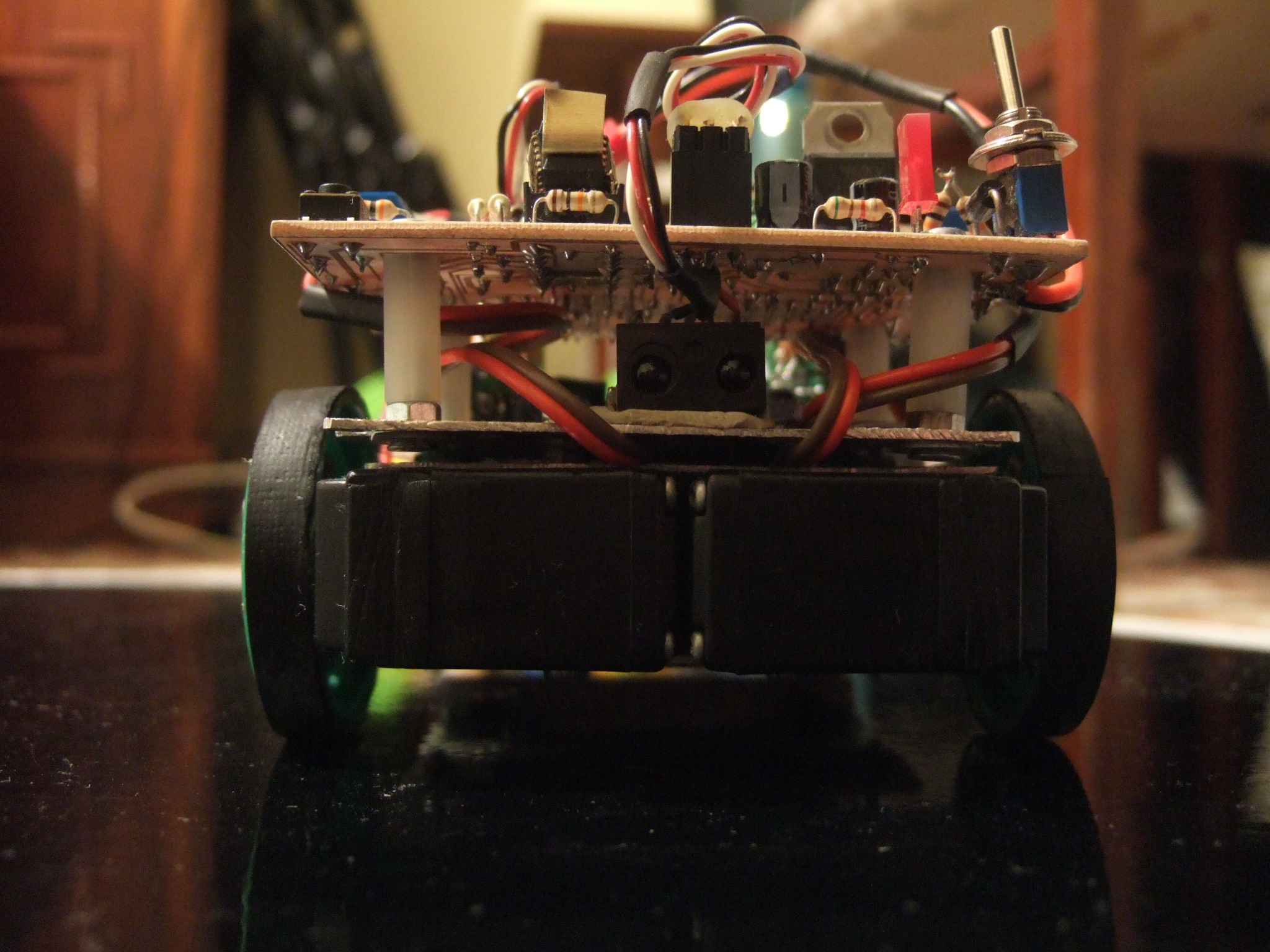 |
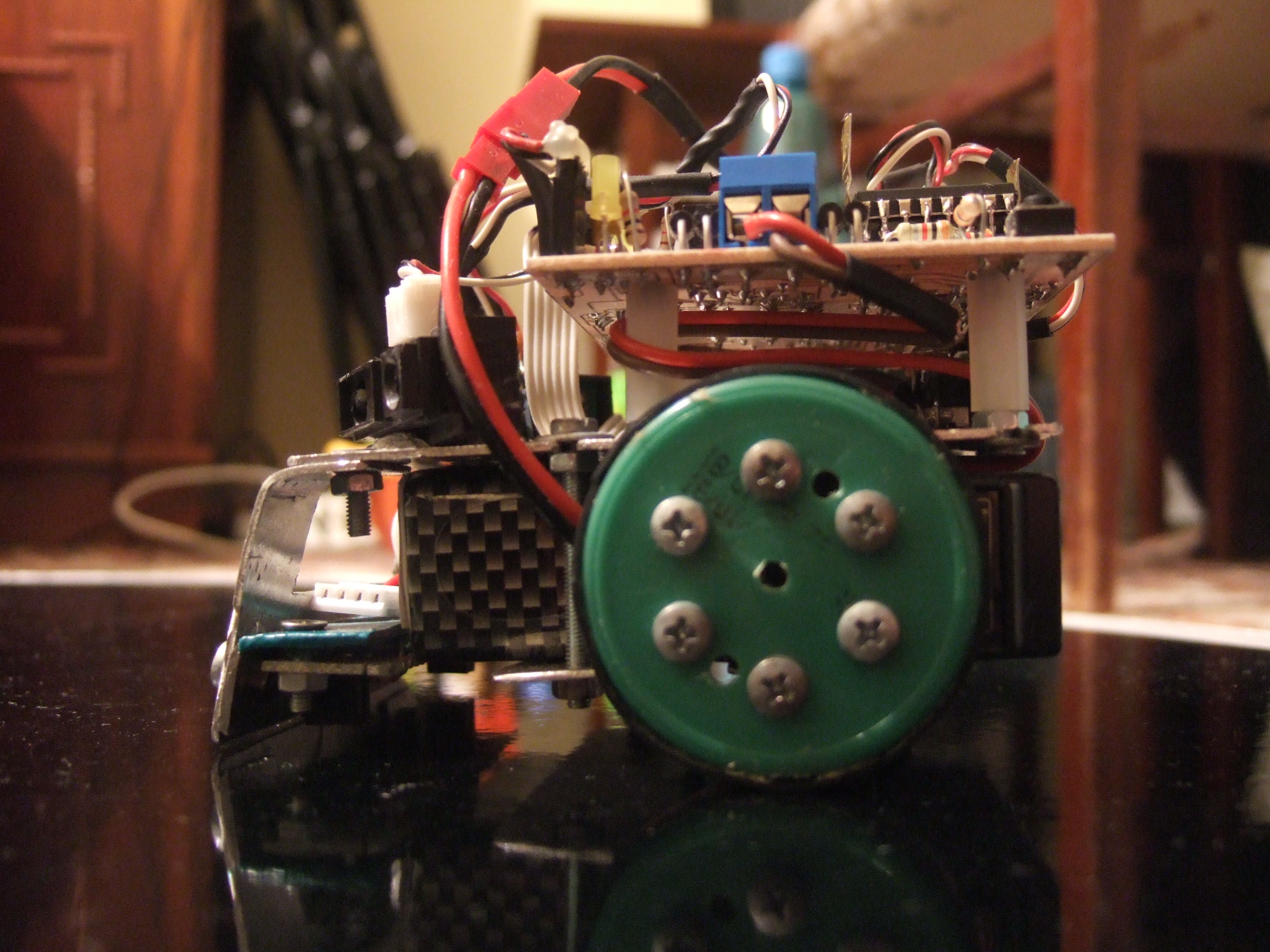
Vedere din spate |
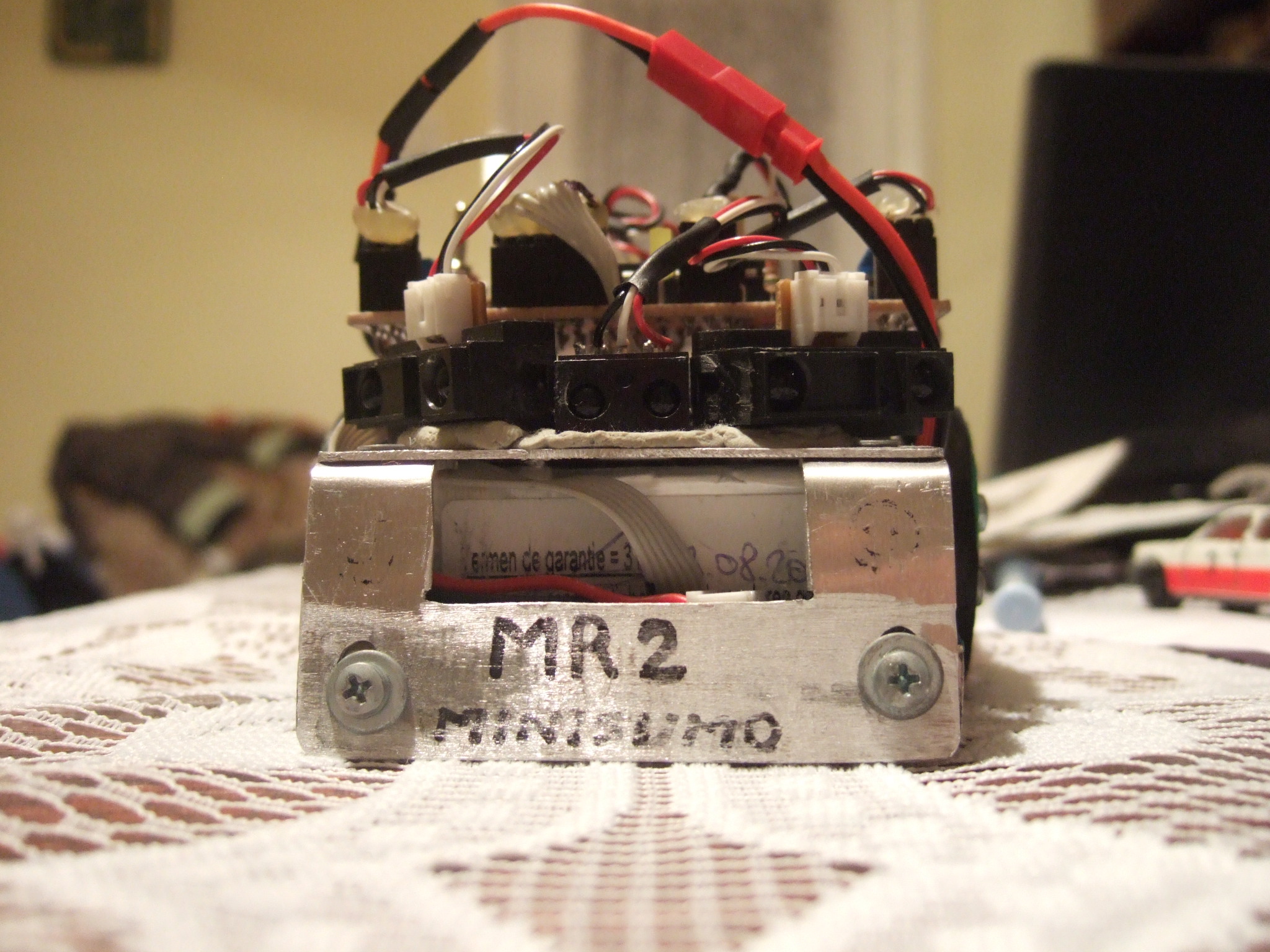 |
Vedere din fata |
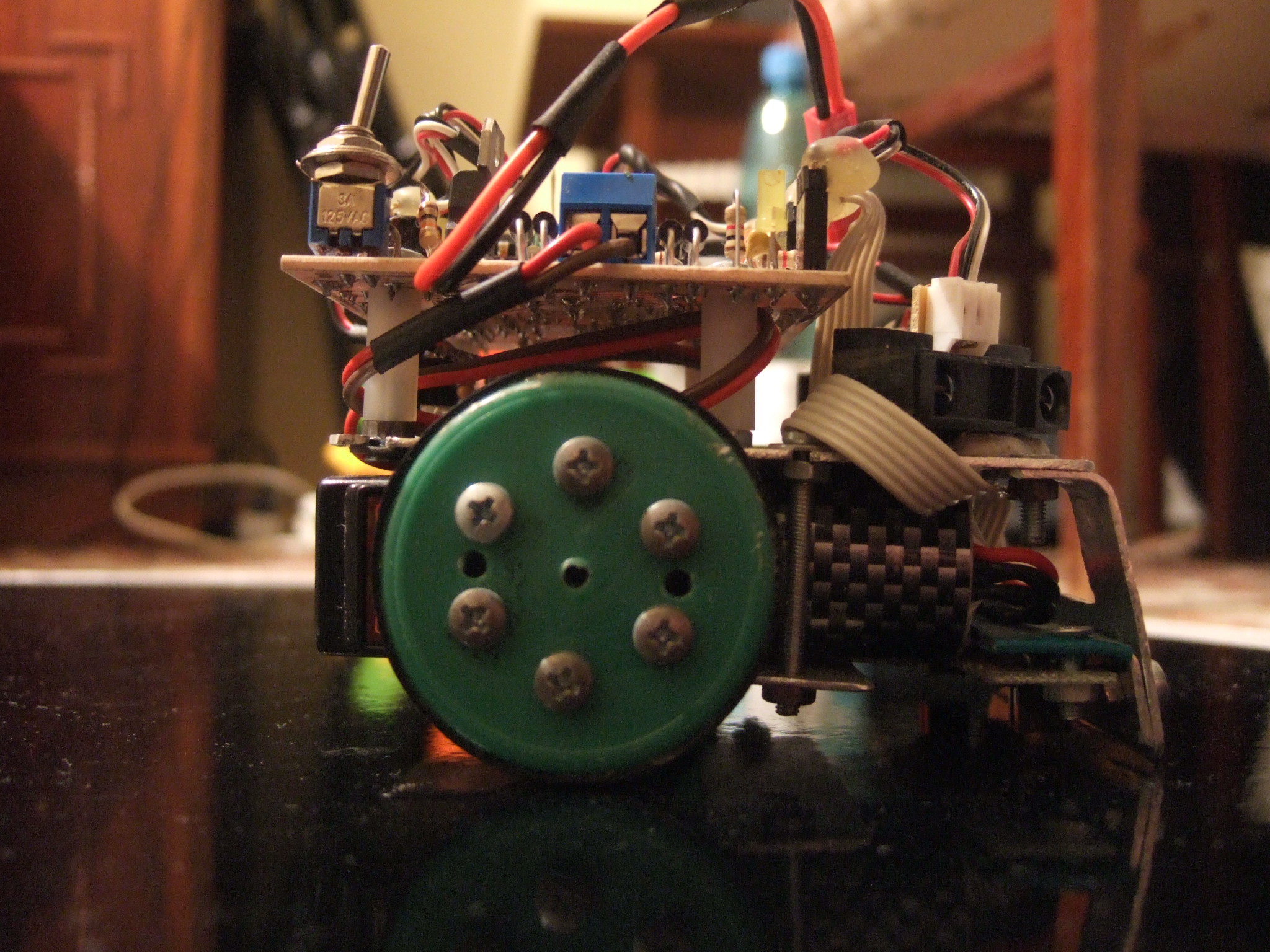 |
Vedere din dreapta |
 |
Vedere din stanga |
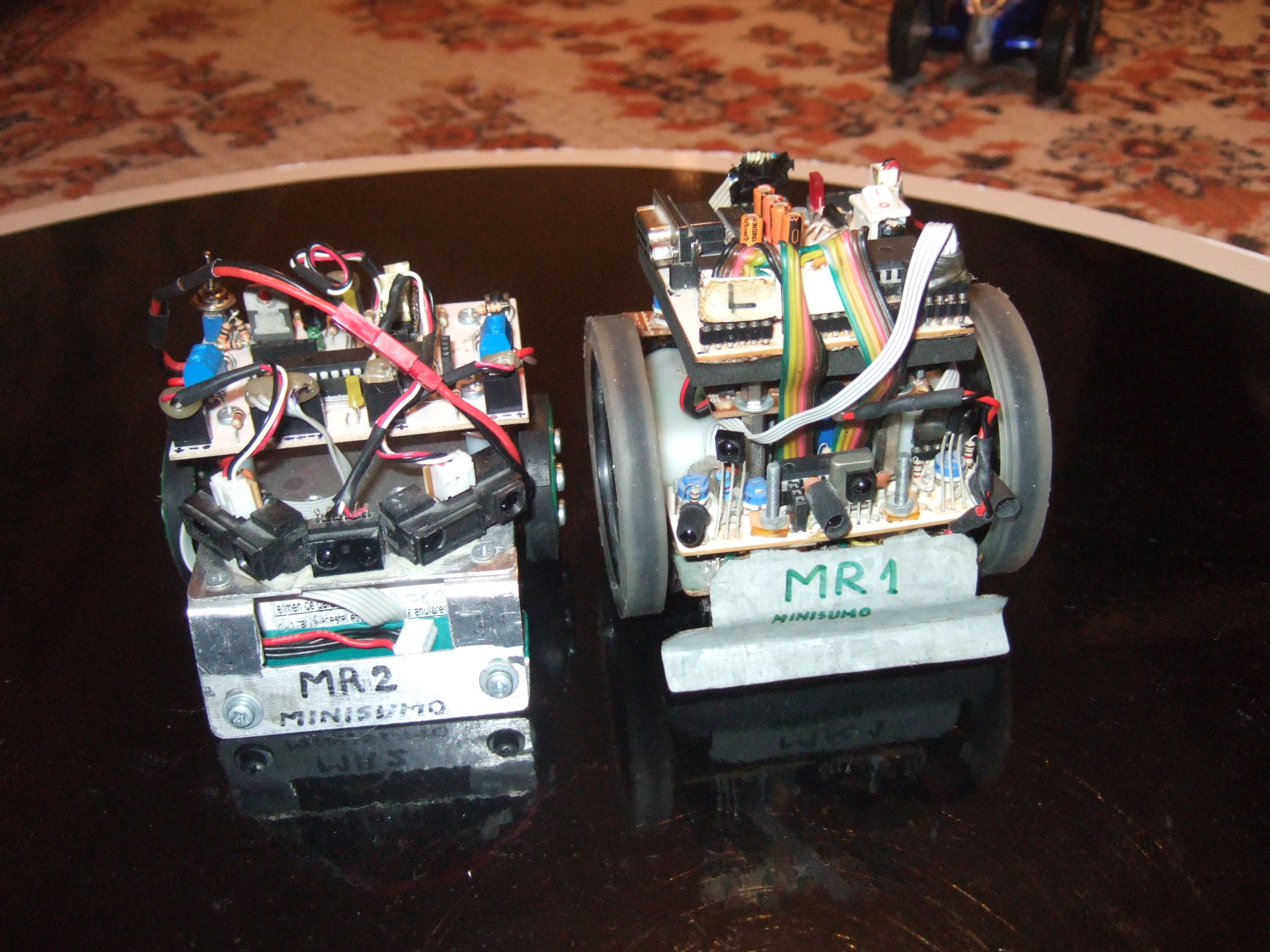 |
Impreuna cu MR2 |
 |
MR2 impotriva unor jucarii |
 |
MR2 impotriva unei sticle cu apa |